Home 理工学部 │ 電気電子専攻
ロボティクス研究室
- 対象学年
- 3・4年次
- 担当教員名
- 柴田 昌明
- Masaaki Shibata
- 学びのキーワード
-
- ロボティクス
- 制御プログラミング
- シミュレーション
- 情報発信
研究の内容
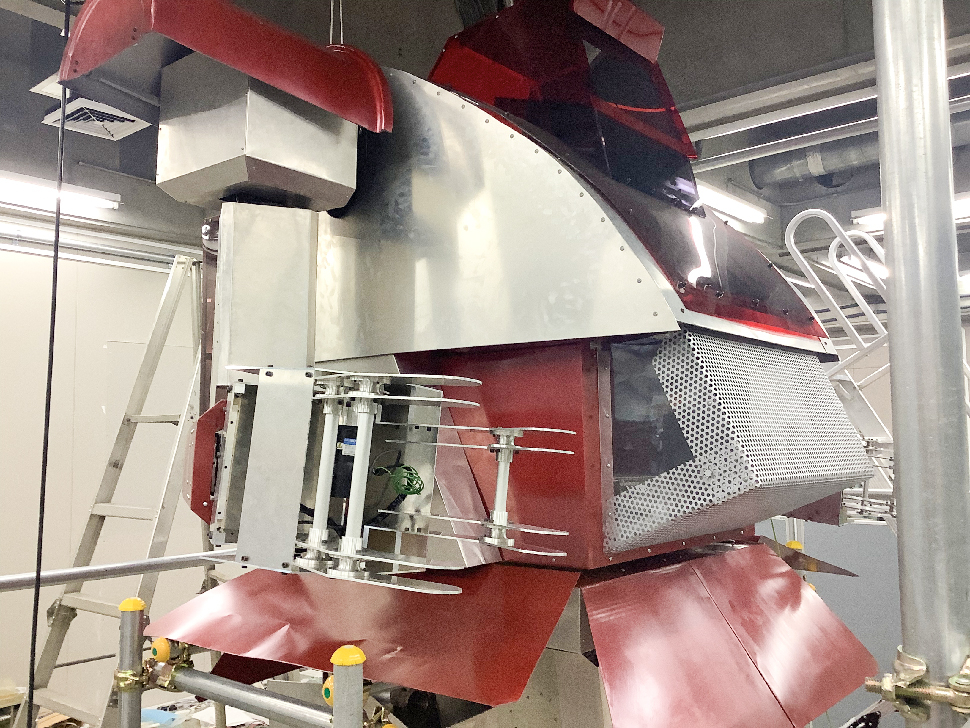
二足歩行ロボットや多脚多関節ロボット、カメラを備えたアーム型ロボット、車輪型移動ロボット、などの実機を設計・製作し、それらの動作制御について研究を行って参りました。新しい構造のロボットを開発し、新しい動作制御方式を考案する、という方針で取り組んでいます。いつも新しいアイデアを追い求め、それを実現することを目指しています。
現在の主要テーマとしては、搭乗できる大型二足歩行ロボットの研究開発に取り組んでいます。ロボット動作の性能や機能を高めるために次々と改良を加えているので、最終完成はまだ先になりそうです。この大型ロボット以外のテーマとしては、水平バランス制御する移動ロボットや画像処理機能を備えたロボットの開発など、さまざまな研究テーマを推進しています。

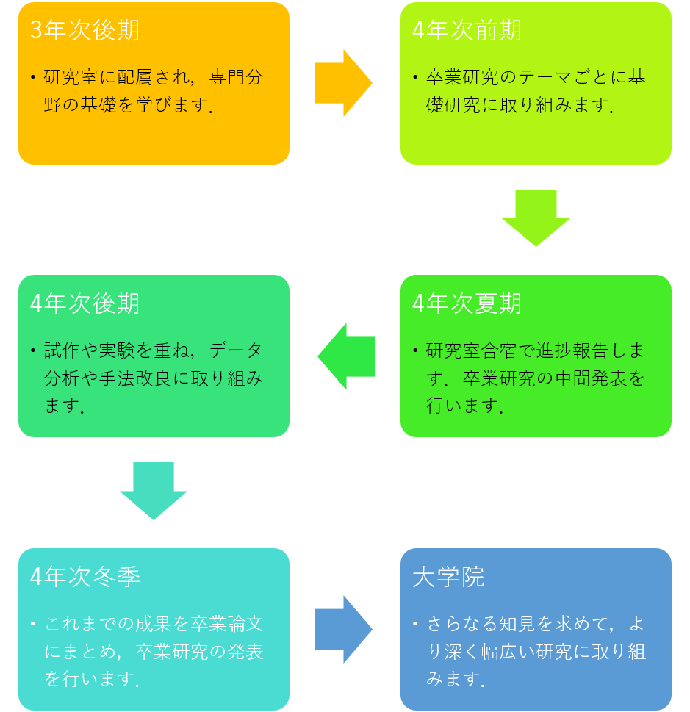
研究の進め方
3年次の後期から研究室に配属され、専門分野に必要な基礎理論などを学びます。4年次に進級した後に、本格的に各自の卒業研究テーマを決めて、それぞれの取り組みを進めます。私たちの研究室では、一人ずつが研究テーマをもって、各自の工夫と創意で作業を進めていきます。研究テーマは別個であっても同じロボットを複数の学生が共同利用するケースもあり、お互いの作業を手伝いあって進めることも多くあります。
研究室には、パソコンのある机が並んだスペースと、ロボットなどの実験装置が並ぶスペースがあります。各自の机でパソコンを使ってシミュレーションを行ったり、データ分析や図面作成したりします。作成した図面データを使って3Dプリンタでロボットの部品を作成することもあります。実験スペースでは、装置につながったパソコンで制御プログラムを作成し、ロボット実機をコンピュータ制御します。電子回路の製作や機械加工の作業なども行います。
研究室ミーティングを週一回のペースで開催し、各自の研究の進み具合を報告しています。指導教員とのディスカッションを通じて、たとえば難しくて困っている問題点や研究方針などについて、研究室の皆と一緒に考えたり、相談したりしています。
社会との関わり
ロボットを開発する仕事、というのは夢があって良いと思います。身の回りを見渡せば、ロボット掃除機やドローンなどのさまざまなロボット製品がすぐ近くに存在しています。電気自動車をはじめ、高機能化された洗濯機や調理器具なども、もはやロボット製品と言っても良いくらいの多機能・高機能を備えていて、そういう意味では、電子装置が組み込まれている製品はロボット技術の一分野と言えるでしょう。研究室で学んだ知識と経験は未来の技術開発に大いに役立つものと思います。
ゼミ・研究室の魅力
- ⽂献を読み解く力が身につく
- 他のゼミ・研究室⽣との交流がある
- 論理的な思考力が鍛えられる
- 研修旅行やゼミ合宿がある
卒業論文のテーマ
- 搭乗型二足歩行ロボットの製作とハンドの設計
- 大型二足歩行ロボットへ導入する重力加速度センサの性能評価と実装
- アーケードコントローラーを用いた大型二足歩行ロボットの腕部関節制御
- 非転倒領域判別を用いた重心制御による二足歩行ロボットの平面踏み出し動作
- ステレオビジョンロボットにおける高速移動対象に対する最適姿勢制御
- ハンドアイロボットによる複数特徴点を持つ物体の正面追従視制御
教員のプロフィール

柴田 昌明
Masaaki Shibata
慶應義塾大学大学院卒。博士(工学)。二足歩行ロボットの動作制御や、カメラ画像とロボット動作の融合制御に関する研究に従事。小学生対象「ロボット教室」や、電気学会の委員会活動など、大学外の活動にも積極的に参画している。
- 研究分野
- ロボット工学、制御工学、画像工学